« FablabJunior Automne 2015/Flieuvre » : différence entre les versions
m FabJunior a déplacé la page FablabJunior Automne 2015/Projet7 vers FablabJunior Automne 2015/Il Va Te Tuer : Chapy |
Aucun résumé des modifications |
||
| (6 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
{{Projet | {{Projet | ||
|status=Experimental | |status=Experimental | ||
|image= | |image=flieuvre.complete.JPG | ||
|description=Robot qui ferme des tentacules a l'aproche d'une main! | |||
|license=CC-by-sa-3.0 | |license=CC-by-sa-3.0 | ||
|contributeurs=Thomas, Thomas Thomas et Thomas sont les constructeurs, | |||
|inspiration=RoBOOrigami | |||
|ingrédients=Bois, Polypropylène, | |||
|machines=Imprimante 3D, | |||
}} | }} | ||
==prototypage== | |||
On commence par un dessin : | |||
[[Image:Pieuvre.fj.jpg|200px]] | |||
on a fait une tentacule en papier pour essayer | |||
==conception == | |||
fait avec blender | |||
Le coeur est imprimé en 3D | |||
[[:File:flieuvre.assemblee.2.blend.zip]] | |||
les pétales sont découpés à la laser | |||
[[File:Flieuvre.petal.cut.svg|400px]] | |||
Le socle est découpé dans du medium 3mm | |||
[[File:Flieuvre.socle.svg|300px]] | |||
==montage== | |||
<gallery> | |||
File:Flieuvre.decoupes.jpg|Les bras sont découpés dans le polypro avec la découpe laser | |||
File:flieuvre.bras.jpg| puis assemblés | |||
File:flieuvre.coeur.interieur.jpg| les coeur accueil tous les composants électroniques | |||
File:flieuvre.coeur.servo.jpg|le servo qui tire les fils | |||
File:Flieuvre.coeur.capteur.jpg|le capteur de distance pour détecter quand on approche la main | |||
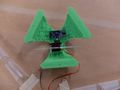
File:flieuvre.complete.JPG| enfin la bête est prête à manger des mains ! | |||
</gallery> | |||
==code== | |||
[[:File:blockly_arduino.xml.zip]] | |||
Dernière version du 4 novembre 2015 à 12:31
Robot qui ferme des tentacules a l'aproche d'une main!

Contributeur·ice·s
Statut du projet
Experimental
License
CC-by-sa-3.0« CC-by-sa-3.0 » n’est pas dans la liste (Je ne sais pas, Licence à définir par la suite, Creative commons, Creative Commons Attribution CC-by-sa-3.0 France, Creative Commons Attribution CC-by-3.0 France, Creative Commons Attribution CC-by-nd-3.0 France, Creative Commons Attribution CC-by-nc-nd-3.0 France, Creative Commons Attribution CC-by-nc-3.0 France, Creative Commons Attribution CC-by-nc-sa-3.0 France, Licences libres, ...) des valeurs autorisées pour la propriété « License ».
Inspiration
Fichiers source
Machines
Matériaux
Lien
[ ]
Description du projet
Robot qui ferme des tentacules a l'aproche d'une main!
prototypage
On commence par un dessin :

on a fait une tentacule en papier pour essayer
conception
fait avec blender
Le coeur est imprimé en 3D
File:flieuvre.assemblee.2.blend.zip
les pétales sont découpés à la laser

Le socle est découpé dans du medium 3mm

montage
-
 Les bras sont découpés dans le polypro avec la découpe laser
Les bras sont découpés dans le polypro avec la découpe laser -
 puis assemblés
puis assemblés -
 les coeur accueil tous les composants électroniques
les coeur accueil tous les composants électroniques -
 le servo qui tire les fils
le servo qui tire les fils -
 le capteur de distance pour détecter quand on approche la main
le capteur de distance pour détecter quand on approche la main -
 enfin la bête est prête à manger des mains !
enfin la bête est prête à manger des mains !




