« Traceur vertical » : différence entre les versions
Aucun résumé des modifications |
|||
| (9 versions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 3 : | Ligne 3 : | ||
|description=Le traceur vertical est un drawbot qui dessine sur un mur. | |description=Le traceur vertical est un drawbot qui dessine sur un mur. | ||
|license=CC-by-sa-3.0 | |license=CC-by-sa-3.0 | ||
|contributeurs=LéonardM, Laurent B, | |contributeurs=LéonardM, Laurent B, | ||
|inspiration=Polargraph, Der Kritzler | |inspiration=Polargraph, Der Kritzler | ||
|ingrédients=Bois, Électronique, PVC, Chaine boulée, Roulement à bille, | |ingrédients=Bois, Électronique, PVC, Chaine boulée, Roulement à bille, | ||
|machines=Decoupe Laser, | |machines=Decoupe Laser, | ||
}} | }} | ||
Le traceur verticale est un drawbot qui par le biais de deux poulies, controlées par des moteurs pas à pas, placés aux deux coins en haut à gauche et en haut à droite permet de se déplacer sur toute une surface au bon vouloir de son utilisateur. Il pourra donc prendre une image et la transformer en dessin sur un mur à une taille allant jusqu'à 2,12 mètre de large et 2m50 de hauteur. | Le traceur verticale est un drawbot qui par le biais de deux poulies, controlées par des moteurs pas à pas, placés aux deux coins en haut à gauche et en haut à droite permet de se déplacer sur toute une surface au bon vouloir de son utilisateur. Il pourra donc prendre une image et la transformer en dessin sur un mur à une taille allant jusqu'à 2,12 mètre de large et 2m50 de hauteur. | ||
| Ligne 12 : | Ligne 12 : | ||
---- | ---- | ||
==Introduction== | |||
Avant de me lancer dans la conception du traceur, j'ai chercher sur internet si ce drawbot existait déjà et il y en a déjà plusieurs dixaines de version! La première version selon mes recherches revient au MIT qui en 1988 construisit le [http://www.open-video.org/details.php?videoid=8213 SIGGRAPH] grâce à des Lego Technic. Ce drawbot a pour mission de prendre une image numérique donnée par l'utilisateur et de la reconstituer avec un stylo/marqueur sur une surface verticale. Il peut servir à des fins pédagogiques (c'est un exemple de montage avec microcontroleur), ludiques (parce que c'est quand même sympa de pouvoir dessiner sur un mur ce que tu veux), communicative (vitrines),etc. | |||
--- | |||
== | ==La conception== | ||
Vous pourrez retrouver la raison tout les choix que j'ai effectué pour arrivé au résultat du traceur vertical sur mon rapport de stage. Si il reste des questions, contactez moi à l'adresse: leonard.marsault@gmail.com | |||
Rapport de Stage: [[Fichier:Rapport de stage part1.pdf]][[Fichier:Rapport de stage part2.pdf]] | |||
==Les pièces == | |||
Pièce fixation mur: | |||
le trou au milieu permet à l'axe du moteur qui dépasse à l'arrière de ne pas frotter contre la pièce, les deux trous proche du milieu permet aux vis de la fixation moteur latéral/arrière de passer. | |||
[[Fichier:PFM.svg]] | |||
Pièce fixation mur/moteur(arrière): | |||
le trou au milieu permet à l'axe du moteur qui dépasse à l'arrière de ne pas frotter contre la pièce, les trou extérieur permettent de passer des vis m3 pour solidariser à la fixation mur, les trous intérieurs accueillent la fixation moteur latérale. | |||
[[Fichier:Piece fixation 4v3.svg]] | |||
Partie fixation latérale moteur: | |||
solidarisée à l'arrière et à l'avant avec la méthode de l'écrou coincé au lieu du pas de vis | |||
[[Fichier:PF3.svg]] | |||
Partie fixation avant: | |||
le trou au milieu permet à l'axe du moteur de ne pas frotter contre la pièce, la partie à droite permet de recevoir la poulie secondaire. | |||
[[Fichier:Fixation moteur1v3.svg]] | |||
==Montage == | |||
== Bibliographie == | == Bibliographie == | ||
http://www.polargraph.co.uk/2012/12/drawbot-history-and-thanksgiving/ | |||
http://www.instructables.com/id/Polargraph-Drawing-Machine/ | |||
http://www.polargraph.co.uk/ | |||
http://makerblock.com/2013/03/a-study-of-drawing-robot-pen-holders-and-design-considerations/ | |||
https://www.marginallyclever.com/blog/2012/02/drawing-lines-arc-and-halftones-with-a-wall-hanging-arduino-drawbot/ | |||
https://www.adafruit.com/blog/2014/07/04/gocupi-go-raspberry-pi-polargraphdrawbot-piday-raspberrypi-raspberry_pi/ | |||
http://www.thingiverse.com/thing:343322 | |||
http://stuartchilds.com/drbo/ | |||
http://academy.cba.mit.edu/2013/labs/providence/drawbot.html | |||
http://plotterbot.com/plotterbot-documentation/plotterbot-prior-art/ | |||
http://juerglehni.com/works/hektor | |||
http://www.instructables.com/id/SADbot-the-Seasonally-Affected-Drawing-robot/?ALLSTEPS | |||
https://www.kickstarter.com/projects/1910641777/muralizer-it-prints-on-walls | |||
http://web.archive.org/web/20111020145609/http://www.as220.org/labs/drawbot/instructions.html | |||
http://tinkerlog.com/2011/09/02/der-kritzler/ | |||
http://makerware.thingiverse.com/thing:299011 | |||
http://dealywhopper.com/?p=105 | |||
https://www.youtube.com/watch?v=_DN6LId7Ils | |||
http://aerobotclubderobticadeaeronuticos.blogspot.com.es/2012/03/garabatobot.html | |||
http://www.polargraph.co.uk/2013/03/hanging-v-myths-or-im-not-very-good-at-geometry/ | |||
http://stuartchilds.com/2012/03/polargraph-drawbot-pen-holder/ | |||
Dernière version du 30 mars 2015 à 10:34
Le traceur vertical est un drawbot qui dessine sur un mur.

Statut du projet
Prototype
License
CC-by-sa-3.0« CC-by-sa-3.0 » n’est pas dans la liste (Je ne sais pas, Licence à définir par la suite, Creative commons, Creative Commons Attribution CC-by-sa-3.0 France, Creative Commons Attribution CC-by-3.0 France, Creative Commons Attribution CC-by-nd-3.0 France, Creative Commons Attribution CC-by-nc-nd-3.0 France, Creative Commons Attribution CC-by-nc-3.0 France, Creative Commons Attribution CC-by-nc-sa-3.0 France, Licences libres, ...) des valeurs autorisées pour la propriété « License ».
Inspiration
Fichiers source
Machines
Matériaux
Lien
[ ]
Description du projet
Le traceur vertical est un drawbot qui dessine sur un mur.
Le traceur verticale est un drawbot qui par le biais de deux poulies, controlées par des moteurs pas à pas, placés aux deux coins en haut à gauche et en haut à droite permet de se déplacer sur toute une surface au bon vouloir de son utilisateur. Il pourra donc prendre une image et la transformer en dessin sur un mur à une taille allant jusqu'à 2,12 mètre de large et 2m50 de hauteur.
Introduction
Avant de me lancer dans la conception du traceur, j'ai chercher sur internet si ce drawbot existait déjà et il y en a déjà plusieurs dixaines de version! La première version selon mes recherches revient au MIT qui en 1988 construisit le SIGGRAPH grâce à des Lego Technic. Ce drawbot a pour mission de prendre une image numérique donnée par l'utilisateur et de la reconstituer avec un stylo/marqueur sur une surface verticale. Il peut servir à des fins pédagogiques (c'est un exemple de montage avec microcontroleur), ludiques (parce que c'est quand même sympa de pouvoir dessiner sur un mur ce que tu veux), communicative (vitrines),etc.
---
La conception
Vous pourrez retrouver la raison tout les choix que j'ai effectué pour arrivé au résultat du traceur vertical sur mon rapport de stage. Si il reste des questions, contactez moi à l'adresse: leonard.marsault@gmail.com
Rapport de Stage: 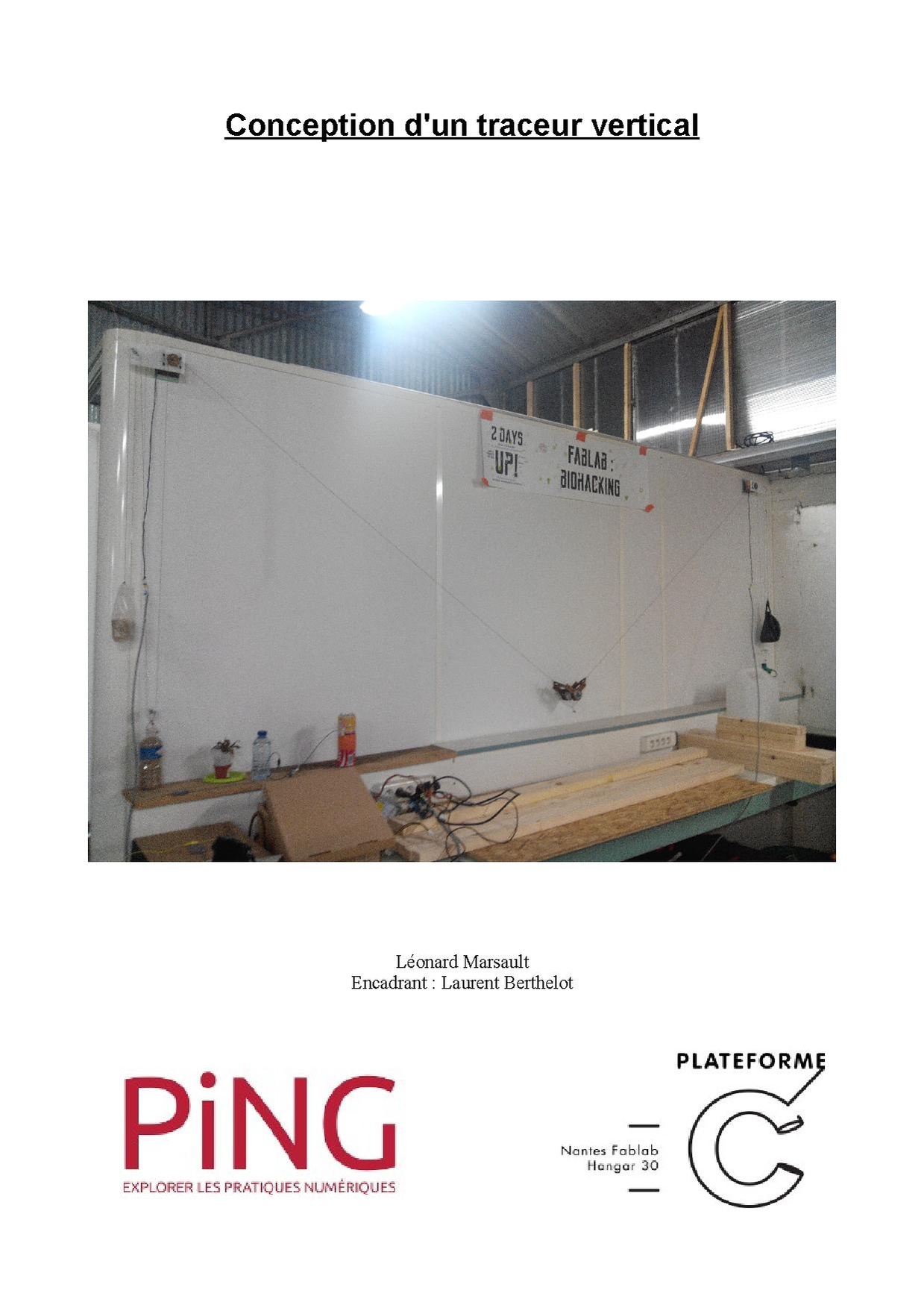
Les pièces
Pièce fixation mur: le trou au milieu permet à l'axe du moteur qui dépasse à l'arrière de ne pas frotter contre la pièce, les deux trous proche du milieu permet aux vis de la fixation moteur latéral/arrière de passer.

Pièce fixation mur/moteur(arrière): le trou au milieu permet à l'axe du moteur qui dépasse à l'arrière de ne pas frotter contre la pièce, les trou extérieur permettent de passer des vis m3 pour solidariser à la fixation mur, les trous intérieurs accueillent la fixation moteur latérale.

Partie fixation latérale moteur: solidarisée à l'arrière et à l'avant avec la méthode de l'écrou coincé au lieu du pas de vis

Partie fixation avant: le trou au milieu permet à l'axe du moteur de ne pas frotter contre la pièce, la partie à droite permet de recevoir la poulie secondaire.

Montage
Bibliographie
http://www.polargraph.co.uk/2012/12/drawbot-history-and-thanksgiving/ http://www.instructables.com/id/Polargraph-Drawing-Machine/ http://www.polargraph.co.uk/ http://makerblock.com/2013/03/a-study-of-drawing-robot-pen-holders-and-design-considerations/ https://www.marginallyclever.com/blog/2012/02/drawing-lines-arc-and-halftones-with-a-wall-hanging-arduino-drawbot/ https://www.adafruit.com/blog/2014/07/04/gocupi-go-raspberry-pi-polargraphdrawbot-piday-raspberrypi-raspberry_pi/ http://www.thingiverse.com/thing:343322 http://stuartchilds.com/drbo/ http://academy.cba.mit.edu/2013/labs/providence/drawbot.html http://plotterbot.com/plotterbot-documentation/plotterbot-prior-art/ http://juerglehni.com/works/hektor http://www.instructables.com/id/SADbot-the-Seasonally-Affected-Drawing-robot/?ALLSTEPS https://www.kickstarter.com/projects/1910641777/muralizer-it-prints-on-walls http://web.archive.org/web/20111020145609/http://www.as220.org/labs/drawbot/instructions.html http://tinkerlog.com/2011/09/02/der-kritzler/ http://makerware.thingiverse.com/thing:299011 http://dealywhopper.com/?p=105 https://www.youtube.com/watch?v=_DN6LId7Ils http://aerobotclubderobticadeaeronuticos.blogspot.com.es/2012/03/garabatobot.html http://www.polargraph.co.uk/2013/03/hanging-v-myths-or-im-not-very-good-at-geometry/ http://stuartchilds.com/2012/03/polargraph-drawbot-pen-holder/